
在有多个对象需要设置一系列动作的系统中,就会出现所谓的最优控制问题。 例如,在控制飞船或一个国家的税收制度的任务。 在数学上,这意味着您需要最小化或最大化系统的某些参数(例如,最小化时间或最大化就业)。 没有普遍接受的通用方法来对此类系统进行数值分析,但有许多方法和算法。 俄罗斯科学院RUDN和FITZ"信息学与管理"的研究人员提出了基于几种现代计算机算法的两种方法,以解决一组机器人的最佳控制问题。
"一组机器人必须在最短的时间内从给定的初始状态移动到最终状态,避开障碍物。 问题属于无限维优化类。 其数值解有两类方法。 直接方法基于对有限维优化问题的简化。 间接方法是基于应用庞特里亚金最大原则过渡到边界值问题及其随后的数值解,"RUDN机械和控制过程系高级讲师Sergey Konstantinov。
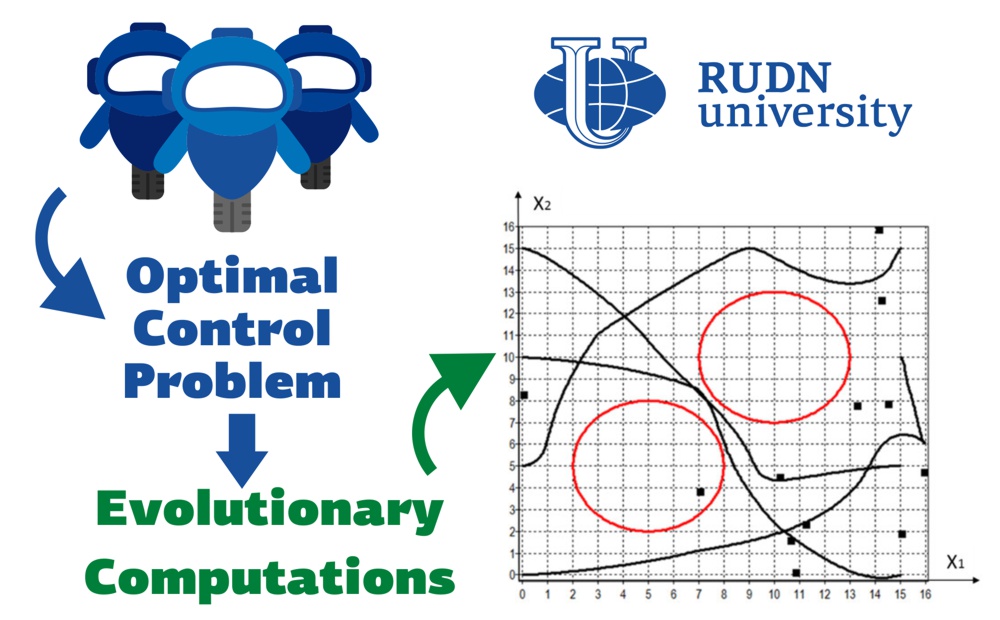
科学家们提出了两种基于直接方法解决最优控制问题的方法。 在测试任务中,机器人必须从起点移动到终点,并且不与障碍物和其他机器人碰撞。 在第一种方法中,一组机器人被视为单个对象。 这种情况下的最优控制问题简化为非线性规划问题。 这意味着它不能简化为线性方程组,这使任务复杂化。 在第二种方法中,首先搜索每个机器人的吸引子–机器人运动平面上的特殊点,其任务是"告诉"机器人如何绕过途中的障碍物。 此外,所获得的结果用于解决整个初始问题。 使用进化算法和随机搜索方法实现了基于两种方法的计算。 科学家们对四种进化算法和随机搜索方法中的每一种进行了10次测试,并比较了他们的工作。
基于目标函数--在最优控制问题中需要最小化的函数的值,评估了两种方法和5种算法(随机搜索方法和4种进化算法:遗传算法、粒子群方法、蜜蜂算法和灰狼算法)的有效性。 它越小,算法处理得越好。 对于第一种方法,所有进化算法都比随机搜索方法更有效。 "粒子群方法"应对最好的是,目标函数的值平均为5.5。 对于随机搜索方法,这个值几乎高出三倍-15.83。 对于第二种方法,随机搜索方法也证明是最无效的。 进化算法同样有效地工作。 在其中一个测试中,灰狼算法给出了目标函数的最小值-2.49。
最近五年,俄罗斯人民友谊大学与中国高校及科研机构的科研合作取得了令人瞩目的成果。双方合作发表的科研论文超过1000篇,涵盖工程技术、医学、社会科学等多个领域。其中19篇论文被世界顶级期刊收录,充分展现了双方科研的卓越水平。
自 2023 年以来,俄罗斯人民友谊大学的科研和教学人员排名已经确定了三个关键类别的领导者:“被引用次数最多的科学家”、“研发工作商业化的领导者”和“最好拨款的经理”。
俄罗斯人民友谊大学举行盛大的颁奖典礼,颁发年度科学与创新奖。四位大学科学家荣获此奖:德米特里·库切尔、奥尔加·洛马金娜、康斯坦丁·戈莫诺夫和维亚切斯拉夫·别吉舍夫。